Satu pasukan dari tiga ahli robot dari Queensland University of Technology (QUT) mempunyai mengembangkan cara yang lebih cepat dan lebih tepat untuk robot untuk memahami objek dalam masa nyata, membuka pintu bagi aplikasi dalam tetapan perindustrian dan domestik.
Mereka kertas telah dibentangkan di persidangan robotik antarabangsa Carnegie Mellon, Robotik: Sains dan Sistem, minggu lepas.
Mengambil langkah bayi
Tiada siapa yang boleh menafikan bahawa robotik adalah cara masa depan. Mengikut Perbadanan Data Antarabangsa, perbelanjaan di seluruh dunia untuk robotik akan mencapai $ 135 bilion oleh 2019.
Walaupun robot telah lama menggantikan buruh manusia dalam barisan pemasangan dan perhitungan dan bahkan telah mula melihat, mendengar dan berfikir seperti manusia dalam catur dan perdebatan, robot tidak dapat memahami sesuatu - memungut objek dalam persekitaran yang tidak tersusun.
Walaupun untuk manusia, walaupun tanpa disedari, beribu-ribu sensor dalam jari manusia dan rangkaian litar kompleks di dalam otak manusia membolehkan anak berusia 3 bulan untuk mengambil mainan mainannya. Walau bagaimanapun, dia jelas tidak memerlukan jam latihan atau beratus-ratus penyelidik untuk mengajarnya.
Tetapi bagi robot, menggenggam objek dalam persekitaran yang tidak berstruktur amat sukar. Namun, untuk menjadi berguna di sekeliling manusia, robot perlu tahu cara menyesuaikan diri dengan perubahan lingkungan.
Pasukan QUT telah membangunkan kaedah baharu untuk robot untuk memahami item yang bergerak secara rawak dengan lebih cepat dan tepat.
"Kami berminat untuk mewujudkan robot yang melakukan tugas yang berguna di dunia nyata. Saya telah berminat untuk mendapatkan robot untuk berinteraksi dengan dunia, memilih objek dan meletakkannya dengan betul, "kata Jürgen Leitner, seorang penyelidik pasca doktoral di QUT Fakulti Sains dan Kejuruteraan. "Ternyata beberapa perkara yang sukar bagi kita adalah mudah untuk komputer, seperti catur, sementara beberapa perkara yang mudah untuk kita sangat rumit untuk robot, seperti menggenggam."
Pendekatan baru
Teknik pembelajaran mendalam membolehkan robot untuk belajar dari beribu-ribu saiz dan bentuk untuk mengira cara terbaik untuk memahami item yang tidak diketahui dalam keadaan statik.
Sebagai contoh, robot dengan rangkaian neural convolutional (CNN), kaedah yang paling banyak digunakan untuk pengenalan objek, sampel dan pangkat objek secara individu dan memikirkan cengkaman terbaik. Walau bagaimanapun, teknik ini mengambil masa pengiraan yang panjang, walaupun dalam persekitaran statik.
Walau bagaimanapun, kaedah penyelidik adalah berasaskan rangkaian neural convolutional generic (GG-CNN), yang secara langsung mengimbas persekitarannya dan memetakan setiap piksel yang ditangkap menggunakan imej kedalaman, dan cukup pantas untuk memahami objek bergerak.
Pendekatan Rangkaian neural Convrational Grasping Generative berfungsi dengan meramalkan kualiti dan pose genggaman dua jari pada setiap piksel. Dengan pemetaan apa yang ada di depannya dengan menggunakan imej yang mendalam dalam satu pas, robot tidak perlu mencontohi pelbagai kemungkinan yang mungkin sebelum membuat keputusan, mengelakkan masa pengkomputeran yang panjang, "kata Douglas Morrison, seorang penyelidik doktor QUT dalam kenyataan.
Walaupun robot terdahulu mereka, yang memenangi Cabaran Memilih Amazon di 2017, hanya melihat ke dalam tong sampah, mengira cengkaman terbaik dan membabi buta masuk untuk mengambilnya, versi terkini mereka memproses imej objek dalam kira-kira milenium 20.
Menurut Leitner, setelah mengambil objek, robot saat ini menempatkan mereka di lokasi yang tetap dan mulai mencari item berikutnya di tempat kejadian.
Dunia yang tidak dapat diramalkan
Para penyelidik menguji pendekatan baru mereka dalam pelbagai cara.
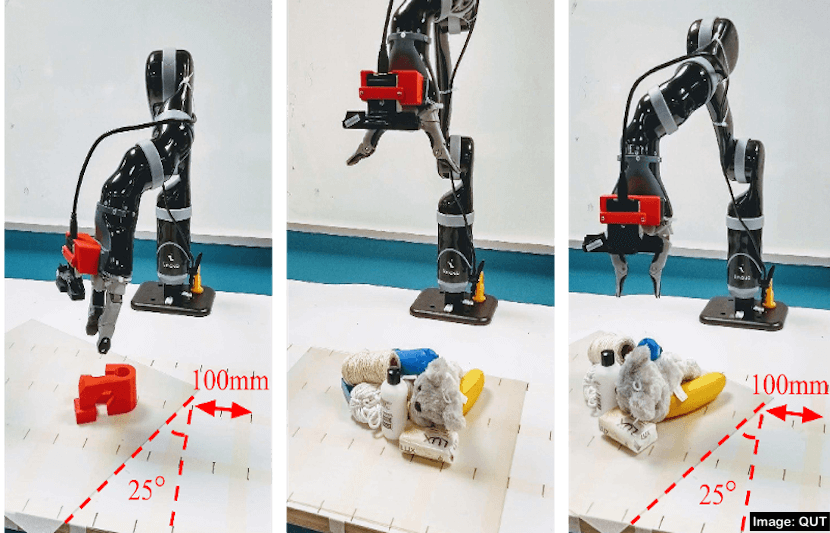
"Terdapat pelbagai persediaan eksperimen, semuanya dengan robot dan benda dunia sebenar," kata Leitner. "Kami menguji dengan pelbagai 'objek rumah,' objek dicetak 3D, dan kami mengesahkan pendekatan dengan tahap bunyi yang berbeza dalam pengawal robot."
Mula-mula, mereka melakukan percubaan 10 untuk menggenggam objek yang tidak kelihatan dengan geometri musuh dan objek rumah di bawah persekitaran statik dan bergerak.
Walaupun robot berjaya mencapai kadar kejayaan 84 peratus untuk geometri adversarial dan 92 peratus untuk objek rumah di bawah persekitaran statik, ia mencapai peratus 83 dan 88 masing-masing di bawah persekitaran yang bergerak.
Kedua, mereka menguji objek ujian 10 dalam kotak dan menuangkannya ke dalam timbunan berantakan di bawah robot untuk memegangnya satu demi satu. Mereka kemudiannya melakukan percubaan 10 dengan menggenggam di bawah persekitaran statik dan bergerak.
Walaupun robot berjaya mencapai kadar kejayaan peratusan 87 di bawah persekitaran statik, ia mencapai peratus 81 di bawah persekitaran yang bergerak.
"Dengan menggunakan kaedah baru ini, kita boleh memproses imej objek yang dilihat oleh robot dalam kira-kira milenium 20, yang membolehkan robot mengemaskini keputusannya di mana untuk memahami objek dan kemudian melakukannya dengan tujuan yang lebih besar. Ini amat penting dalam ruang berantakan, "kata Letiner dalam satu kenyataan.
Langkah seterusnya
Para penyelidik berharap untuk meningkatkan lagi kaedah mereka untuk digunakan robot dengan lebih selamat dan meluas di sekeliling manusia dalam keadaan perindustrian dan domestik.
"Barisan penyelidikan ini membolehkan kami menggunakan sistem robotik bukan hanya dalam tetapan berstruktur di mana seluruh kilang dibina berdasarkan keupayaan robotik," kata Leitner dalam satu kenyataan. "Ini mempunyai manfaat untuk industri - dari gudang untuk membeli-belah dalam talian dan penyortiran, melalui pemilihan buah. Ia juga boleh digunakan di rumah, kerana robot yang lebih pintar dibangunkan untuk tidak hanya mengosongkan atau mengepam lantai, tetapi juga untuk memilih barangan dan meletakkannya. "
Mereka juga berusaha untuk mengatasi beberapa batasan pendekatan semasa, seperti penglihatan robot dan kemahiran manipulasi dalam pelbagai tetapan, menurut Leitner.
Mereka sedang merancang untuk menganjurkan "Robotik Tidy Up My Room Challenge."

