Cheetah robot adalah salah satu ciptaan yang paling popular MIT telah berkembang pada abad 21st. Reka bentuk, kelajuan, saiz, kekuatan dan keupayaan melompat menjadikannya kegemaran penggemar dan memberikannya aplikasi dunia nyata.
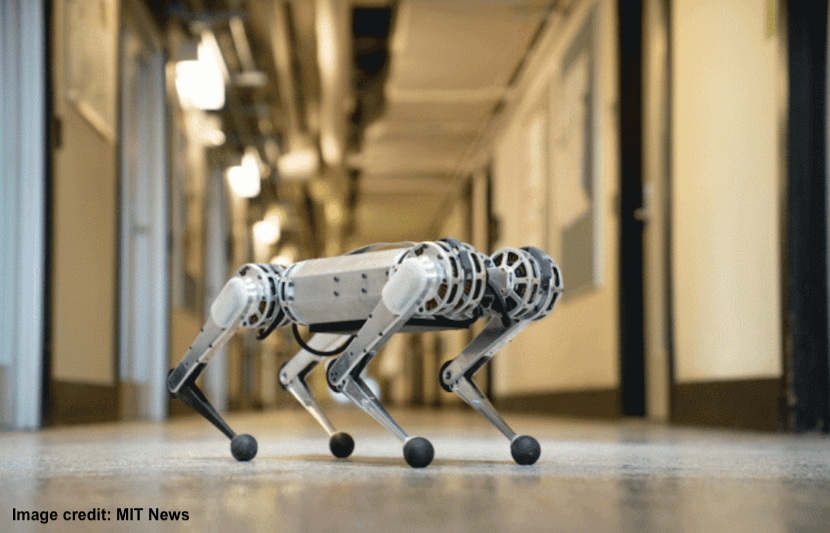
Sekarang, a robot generasi ketiga, yang dinamakan Cheetah 3, boleh melakukan perjalanan dengan lancar di medan kasar, memanjat tangga yang ditutupi dengan serpihan, dan dengan mudah pulih keseimbangannya apabila didorong atau dibangkitkan, tanpa sebarang penglihatan.
Pita 90, robot "buta" akhirnya boleh menjalankan pemeriksaan loji kuasa, mengembara melalui sistem pembetungan, menyelamatkan orang dalam kebakaran bangunan, dan meningkatkan pergerakan penduduk tua.
Daripada bergantung pada kamera, kucing mekanikal menggunakan "locomotion blind" untuk merasakan jalannya melalui persekitarannya.
"Teknologi lokomotif buta menjadikan robot lebih mantap terhadap situasi yang tidak dijangka seperti melangkah pada halangan atau perlanggaran dengan objek yang tidak dimodelkan," kata Sangbae Kim, seorang profesor kejuruteraan mekanikal di MIT dan pereka robot.
"Visi boleh berisik, sedikit tidak tepat, dan kadang-kadang tidak tersedia, dan jika anda terlalu bergantung pada penglihatan, robot anda harus sangat tepat dalam kedudukan dan lambat laun," katanya dalam satu kenyataan. "Jadi kami mahu robot itu lebih bergantung pada maklumat sentuhan. Dengan cara itu, ia boleh mengatasi halangan-halangan yang tidak dijangka semasa bergerak pantas. "
Berbanding dengan Cheetah 2, robot baru ini telah meningkatkan perisian dan pelbagai gerakan yang semakin berkembang.
Ia boleh menghulurkan ke hadapan dan ke belakang dan berpusing dari sisi ke sisi, menjadikannya lincah dan olahraga seperti kucing besar.
Algoritma lanjutan
Sehingga ini, penyelidik di Malaysia Makmal Robotik Biomimetik MIT tidak membangunkan mesin dengan mobiliti yang berkesan di medan kasar.
Dua algoritma baru - algoritma pengesanan kenalan dan algoritma kawalan ramalan model - memberikan Cheetah 3 kuasa untuk mendapatkan pulangan yang lebih pantas, mengembara melalui medan yang sukar, perjalanan tangga, dan bergerak dengan kecekapan haiwan yang dekat.

Algoritma pengesanan kenalan membolehkan robot memahami apabila ia sepatutnya menghentikan kaki tertentu dari berayun dan meletakkannya di atas tanah.
Algoritma ini menyimpan robot daripada kehilangan keseimbangannya kerana ia tahu sama ada untuk meneruskan dengan langkah atau menarik kembali kakinya ketika menghadapi halangan.
Agar robot tahu bila kaki peralihan, ia sentiasa mempertimbangkan tiga kebarangkalian - kaki yang menyentuh tanah, daya yang dihasilkan dari kaki memukul tanah, dan jika kaki akan berada di tengah-tengah ayunan.
Algoritma mengira kebarangkalian berdasarkan data dari accelerometers, gyroscopes, dan sudut dan ketinggian setiap kaki berkenaan dengan tanah.
Tubuh robot boleh bertindak balas terhadap halangan yang tidak dijangka. Sekiranya langkah itu dilakukan pada sesuatu, badan dan kaki akan menyesuaikan agar dapat menjaga keseimbangannya.
"Jika manusia menutup mata kita dan membuat langkah, kita mempunyai model mental di mana tanah itu mungkin, dan boleh mempersiapkannya. Tetapi kita juga bergantung pada rasa sentuhan tanah, "kata Kim dalam satu kenyataan. "Kami semacam melakukan perkara yang sama dengan menggabungkan pelbagai [sumber] maklumat untuk menentukan masa peralihan."
Algoritma kawalan prediktif model menentukan berapa banyak daya robot perlu dikenakan pada setiap kaki dengan setiap langkah supaya ia boleh memindahkan badannya dengan cara yang paling berkesan.
Lebih khusus lagi, algoritma ini berfungsi dengan mencari setengah jam ke masa depan untuk mengira kedudukan badan dan kaki robot yang sepatutnya.
"Katakanlah seseorang menendang robot ke tepi," kata Kim dalam satu kenyataan. "Apabila kaki sudah berada di atas tanah, algoritma itu memutuskan, 'Bagaimanakah saya hendak menentukan kuasa di kaki? Kerana saya mempunyai halaju yang tidak diinginkan di sebelah kiri, jadi saya ingin menerapkan gaya ke arah yang bertentangan untuk membunuh halaju itu. Jika saya menggunakan newtons 100 dalam arah yang bertentangan ini, apa yang akan berlaku setengah saat kemudian? ' "
Algoritma ini membuat kalkulasi ini 20 kali sesaat.
Untuk mengujinya, para penyelidik mendorong, menarik dan merangkul robot ketika berjalan di atas treadmill.
Para penyelidik akan membentangkan Cheetah 3 pada bulan Oktober di Persidangan Antarabangsa mengenai Robot Pintar, di Madrid.
Aplikasi dunia nyata
Tidak seperti robot cheetah sebelumnya, Cheetah 3 direka untuk menjaga keselamatan orang ramai.
"Teknologi ini akan membolehkan kita membangunkan mesin yang boleh kita hantar dalam situasi berbahaya dan bukannya menghantar manusia," kata Kim.
Mesin itu dijangka siap untuk memeriksa loji kuasa dan loji kimia dalam tempoh dua hingga tiga tahun.
Dalam tempoh tiga hingga lima tahun, ia akan dapat menavigasi melalui pembetung, kata Kim.
Dalam tahun-tahun 15, ia boleh menyelamatkan seseorang dari bangunan yang terbakar.
Cheetah 3 sudah mampu mengukur suhu dan sebatian kimia, membuka pintu berat, dan menutup dan membuka injap.
"Dengan menggunakan kelenturan anggota badan, Cheetah 3 boleh membuka pintu dengan satu kaki," kata Kim dalam satu kenyataan. "Ia boleh berdiri di atas tiga kaki dan melengkapkan anggota keempat dengan tangan swap yang disesuaikan untuk membuka pintu atau menutup injap."
Dalam tahun-tahun 20, Kim percaya robot dinamik dan berkaki yang sama dapat bersedia membantu orang tua di rumah mereka.
"Kami masih tidak mempunyai teknologi yang boleh membantu orang cacat atau warga tua lancar bergerak dari katil ke kerusi roda ke kereta dan kembali lagi," katanya dalam satu kenyataan.
"Banyak orang tua mempunyai masalah keluar dari katil dan memanjat tangga. Sesetengah orang tua dengan masalah sendi lutut, sebagai contoh, masih mudah bergerak di atas tanah rata, tetapi tidak boleh memanjat tangga tanpa bantuan. Itulah pecahan yang sangat kecil pada hari ketika mereka memerlukan bantuan. Oleh itu, kami mencari sesuatu yang ringan dan mudah digunakan untuk bantuan jangka masa pendek. "
Apa yang akan datang?
Para penyelidik tidak bermaksud robot itu "buta" selama-lamanya. Sebenarnya, mereka telah menambah beberapa kamera untuk memberikan gambaran persekitarannya supaya lebih menyedari halangan yang besar.
Tetapi buat masa ini, pasukan ini memberi tumpuan untuk meningkatkan gerakan buta Cheetah.
"Kami mahu pengawal yang sangat baik tanpa penglihatan terlebih dahulu," kata Kim dalam satu kenyataan. "Dan apabila kita menambah penglihatan, walaupun ia mungkin memberi anda maklumat yang salah, kaki harus dapat menangani (halangan). Kerana bagaimana jika langkah-langkah pada sesuatu yang kamera tidak dapat dilihat? Apa yang akan dilakukannya? Di sinilah lokomosi buta dapat membantu. Kami tidak mahu mempercayai visi kami terlalu banyak. "

